The rain was so heavy that, in no time, we were all completely drenched. We didn’t have time to put on our rain gear. Luckily, I had decided to pack the drone in a dry bag inside the backpack. So at least I knew that the Phantom 4 would stay dry.
The conditions got worse and worse. Fog started to engulf the side of the mountain. We were rushing up the mountainside, which had become increasingly slippery. The rain not only turned the sheets of rock into a slippery mess but also created waterfalls all around us. The water found every possible way down the mountain, and so we got wet not only
from the falling rain but also from the water rushing down all around us.
I started to get really exhausted, and my legs felt heavier and heavier—not only because of the wet clothes, which added even more weight, but also because of the lack of breaks. Andrea, our mountain guide, kept pushing us and did not let us slow down. We had to get up over this crest so that we could get off the ferrata. At times, you could see the flashes of lightning all around us, immediately followed by incredibly loud thunder. The sound bounced off the walls like a ball inside a pinball machine. We were inside this storm, and it was a frightening one.
The temperature started to drop and the rain turned into ice rain and then into hail. The falling hail hurt when it hit your face. I tried to focus on keeping myself properly tethered to the ferrata and kept pulling myself up higher and higher. I started mission ready to get freezing cold; my gloves were completely wet, leaving me with less and less feeling in my hands. My pants felt like they were glued to my legs, and the cold wetness felt so uncomfortable. My jacket was wet, my shirt under it was wet, and my skin was wet. I became more and more aggravated as the cold and wetness was getting to me.

I looked up and I could see another subgroup of ours about 20m above us. Their silhouettes were barely visible through the fog; I was envious that they were already up there. At that moment, I slipped on the rock and landed flat on the ground. I cursed as the water rushing down the mountainside was going into my layers of clothing—not that it made a difference; I was already as wet as one can get. But it sure made me feel more uncomfortable.

We managed to make it up to the crest and quickly got off the ferrata. I could see the relief on Andrea’s face. He was glad we had made it without having gotten hit by lightning. While taking off our harness, I noticed the strong, cold wind, and I immediately started to shiver. I had no control over it. Andrea noticed how cold I was, and he ordered my fellow team member Gloria and me to continue our ascent over the rocks. The hard part was behind us, and the tongue of the glacier ice was right next to us. I looked at the beginning of the glacier and realized that’s why it was so much colder up here. The wind was strong, and Gloria and I tried to move quickly to warm up again. The rest of the team was still taking off all their gear, and we quickly put some distance between them and us. At some point, I just stopped and stood there, closing my eyes and thinking, “I can’t do this!” I was so cold and wet and had no motivation. I wanted to turn around and just climb back down, which, of course, was not a valid option.
Gloria and I pushed up, and we got to a snowfield. The snow was soft due to the ice rain. The surface was slippery, and I tried not to fall or sink hip deep into the soft snow. All this navigating used so much strength, and I felt as if I wasn’t able to make it much farther.

Andrea caught up to us, and the three of us quickly led the way up. We all were visibly cold and miserable, and Andrea kept telling us the few milestones ahead. The terrain was difficult with big boulders, snowfields, and pretty steep ascents. At some point, we traversed across and I kept slipping on the boulders; it took so much focus.
Andrea pointed to a ridge and informed us that, once we got to that ridge, we would almost be there. I felt some strength come back as we got closer and closer to the
rifugio. Out of nowhere, I could see an altar and a bell. I couldn’t help myself but aim for the bell and ring it! The sound was so nice, and it meant we were almost at the rifugio. This altar was once used for the pope to hold a ceremony up here; he was flown up by helicopter and spent a few days at the rifugio. Andrea pointed at the side of the mountain, and through the fog, I could see the rifugio. It was right in front of us, only a few minutes away. I marched toward it, reached the stairs up to the entrance, but had to stop three times to rest. These last few steps were hard. I finally made it, entered the rifugio, and took my boots off in the front room. Water was pouring out of my shoes and
my pants. To the left was a room with a fire oven and drying lines set up to put our wet clothes on. I secured myself a spot to undress, and I didn’t mind taking all these wet and cold clothes off. It wasn’t easy as my body was shaking, and the various pieces stuck to my body like a glove. The rest of the team arrived, and everybody was happy to be inside and taking off their wet gear.
It took me a good 30 minutes to undress, dry off, and get my clothes onto the drying line. Unfortunately, all my extra clothes inside the backpack were also wet and cold. Everything in there was wet—except the Phantom 4! Once we were somewhat dry and
warm, we went into the big room and sat at a long table, tired and happy. The rifugio staff made us a quick meal, and I requested some soup to warm up. And that did not disappoint nor fail. It took a couple more hours until I had some feeling back in my fingers and wasn’t shivering anymore. We all met and started discussing the various tests we needed to conduct over the next few days. The students were curious about the technology, and this was the perfect time to do my “drone introduction” segment. I talked about drone technology, how drones work, the various components inside the shell, and the various applications we are seeing. This made me feel warm again. And while I was talking, it stopped raining and we even got to go out for a quick demo flight. I didn’t want to go out into the cold again, but everybody wanted to see the Phantom 4 fly.

First Flights
At this altitude, the quadcopter performed very well. I could feel the thinner air as the platform was much more responsive, especially when descending—less air for the propellers to grab into. I left it at one demo flight as we all were tired and still cold, and so we went inside and enjoyed a great dinner, with more planning discussions.
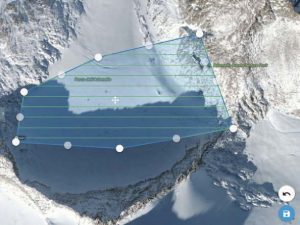
My plan was to use DroneDeploy to map a couple of areas of the Adamello Glacier. One of things we wanted to see was if we could measure a change in the glacier from morning to the afternoon. The mountain guides expressed interest in this, as they can feel and see a difference in the glacier from morning to afternoon. Also, for our search-and-rescue tests, we needed to create a 2D map of one of the search areas.
The protocol for the search-and-rescue tests stated that three different tests were to be conducted for each scenario. So we created three teams, with a mountain guide in each as the lead. Team 1 was to go out into the search area looking for the missing hiker with no additional information; this is just as it is done today. Team 2 was to first see a 2D map that we had just created of the area; based on that data, they got to review their approach. Team 3 was able to use the drone as an additional tool and aerial support during the mission.

We wanted to measure how long it would take until each team spotted the missing person and then made physical contact. Often, there is time between spotting the missing person and making contact. One measurement is if a drone can cut that time down; for example, if you know ahead of time that a missing individual has fallen down a cliff, you can go directly to the bottom of that cliff.
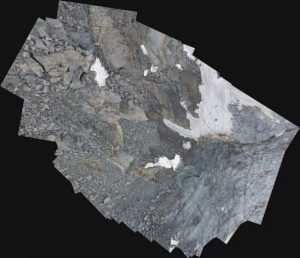
Before the search-and-rescue tests, we flew the DJI Phantom 4, with the assistance of DroneDeploy, over the search area and gathered images to create a 2D mosaic output of the area. It was early in the morning at high altitude, with winds of about 20 knots (23mph) and a temperature of approximately 2°C (35°F)—overall, not bad conditions. And what you would expect on top of a glacier anyway?!
The Phantom 4 flew the mission without any problems, and we quickly off-loaded the images. Since we did not have any connectivity up there, we planned on creating the mosaic with native software on a laptop. It meant that we had to align each row individually and then stitch the rows together. After about 30 minutes, we had a data set and transferred it over to one of the Android smart devices for Team 2 to review. From the past few search-and-rescue missions as well as the humanitarian mission on the Maldives, it had become evident to me that the DJI SDK platform was the key to providing some helpful solutions. I also realized that, while urban environments provide online access, these particular search-and-rescue scenarios oftentimes are in very remote locations with a strong likelihood of no connectivity. And since you need some dataset quick, solutions need to be developed to deal with those limitations.

While Team 2 was reviewing the just-created mosaic of the search area, Team 1 was already out looking for the missing person. These mountaineers know their mountains
and, over the years, have developed a very successful tactical approach. Without going into too much detail, there are areas with a higher probability where that missing person could be: areas around paths and climbing routes, cliff areas, and next to protection-giving areas, like huge boulders. There are additional possibilities, and from years of experience, the team there split up into subgroups to cover some of these areas of higher likelihood. Team 1 ended up finding the missing person in remarkable time.
Team 2 now had an edge over Team 1 as they were able to review the search area, looking for conditions of paths, ice, and snow. They were also looking for any signs that could help them with information. The information learned from this prior review led the team to adjust their original plan and ultimately made them execute the search in a more strategic way. The time it took to locate the individual was also remarkable and was comparable with Team 1. The big difference was that Team 2 had more information and was able to choose a more suitable and safer approach for the team.
It was now Team 3’s turn, and they were able to utilize the drone during their search-and-rescue mission as if the drone were an additional member—an additional set of eyes, just at a higher altitude.
The way we designed this specific test was to pair the team with an experienced operator but somebody who had no search-and-rescue experience. While the aerial view provided an incredible amount of information to the ground team, the challenge was in communicating that information to the ground team. While Team 3 also found the individual in a solid amount of time, they had the additional challenge of communication.
All the information learned was interesting and helpful, and we were curious to see if a second scenario would provide us with similar experiences.
One of the other test scenarios was conducted at lower altitude and in a forested area at about 1,600m (5,200 feet). The tactical approach dramatically changes depending on the search area and environment. A forest introduces additional and different challenges just as a mountaintop or glacier does, especially if the forest is on a mountain slope.
For that particular test, we replaced the Phantom 4 with the Inspire 1 and the DJI/FLIR XT thermal camera with a 7.5mm lens. Again, Team 1 had no additional help, Team 2 got to see a 2D mosaic map of the search area, and Team 3 got to use the drone with thermal view during their search-and rescue mission.
The experiences we had gathered from previous projects using the thermal camera are that settings are key. Standard settings provide, in essence, a data overload. Depending on the project, you may only be interested in a specific dataset (e.g., temperature range). If you’re looking for a human body, for example, you may only be interested in the 35–39°C (95–102°F) range. Anything outside of that may not be of interest and could be more of a visual distraction. So we set up the isotherm settings of the camera to look for those temperatures only. Of course, there are other objects out
in nature that have that same temperature reading, such as rocks in sunlight or perhaps even animals, possibly providing you with false positives. Here is where the experience of the operator kicks in; analyzing the data and using additional features of the camera, such as the digital zoom, or maneuvering the drone to a different position to get a better and more detailed view was in order.

The results from our lower-altitude and forest environment tests were similar to the results from the glacier. The key elements were the quality and knowledge of the search-and-rescue team and the communications. The thermal camera, however, did provide a big benefit and helped locate the missing individual faster.
The research team adopted methods from the biostatistical regulatory field in an effort to create standards that can draw from a mature, rigorous, and validated field of methods, shared with the search-and-rescue and scientific communities so that future studies can contribute comparable evidence to advance our common understanding and prepare the SAR and drone fields for the rigors of regulatory research that will be required of medical devices.

The key lessons learned were that rigorous tests designed with regulatory-grade study protocols, similar to the ones used in the medical industry, are feasible in extreme environments. We also learned that standardized measurements can be collected with robust and easy-to-use data-collection tools, which are suitable for a hard-to-reach environment. Furthermore, the ability of reviewing drone data (maps, footage, sounds, etc.) is affected by the knowledge of the mountain area, mountaineering skills, and search-and rescue practices.
Future research is needed to refine and standardize the study protocols and replicate these experiments and new ones on a larger scale. Comparable, large-scale, methodologically rigorous studies are feasible and should be encouraged so that the claims made are truly based on robust evidence.

Our Takeaway
What we learned was that the improvement in technology and software has made drones a beneficial tool for mountaineers. It has moved from a flying device to a data-collection device that can provide information for live decision-making opportunities. We also learned that knowing where a person is not is helpful information. As these platforms become smaller, lighter, and more capable with more integrated sensors, we will be seeing them used more in a variety of activities in the mountains. These drones will be helping to keep our first responders safe and allow them to make quicker and better decisions, cutting down the time it takes to resolve an incident. It’s hard to argue with technology that can save lives and properties.